盲人版AI(testing)
News
资讯
商业
科技
报告
演讲
发布会
论坛 讲座 圆桌
Academic
CSCC前沿课程学习中心
Google Scholar
镜像1
镜像2
镜像3
镜像4
镜像5
镜像6
镜像7
镜像8
论文
教程
代码
基础书籍
Industry
研报
Coze
机器人开发
building
Agent
Marketing – developing
Quantitative Analysis – developing
Super Factory – developing
AutoAero DepOps
coming
API
NotebookLM
Deepseek
DS – Flowith
DS – 超算
DS – 华为
DS – MiniMax
DS – 百度
DS – WPS
DS – 腾讯
DS – 知乎
DS – 纳米
ChatGPT – coming soon
Other entrance – coming soon
About
Digital AI 数字
Physical AI 物理
Life AI 生命
modeling
未登录
登录后即可体验更多功能
登录
注册
找回密码
News
资讯
商业
科技
报告
演讲
发布会
论坛 讲座 圆桌
Academic
CSCC前沿课程学习中心
Google Scholar
镜像1
镜像2
镜像3
镜像4
镜像5
镜像6
镜像7
镜像8
论文
教程
代码
基础书籍
Industry
研报
Coze
机器人开发
building
Agent
Marketing – developing
Quantitative Analysis – developing
Super Factory – developing
AutoAero DepOps
coming
API
NotebookLM
Deepseek
DS – Flowith
DS – 超算
DS – 华为
DS – MiniMax
DS – 百度
DS – WPS
DS – 腾讯
DS – 知乎
DS – 纳米
ChatGPT – coming soon
Other entrance – coming soon
About
Digital AI 数字
Physical AI 物理
Life AI 生命
modeling
未登录
登录后即可体验更多功能
登录
注册
找回密码
首页
•
论文
•
Explaining Deep Neural Networks and Beyond: A Review of Methods and Applications
Explaining Deep Neural Networks and Beyond: A Review of Methods and Applications
论文
1年前更新
power
462
0
0
Explaining Deep Neural Networks and Beyond: A Review of Methods and Applications
论文
©
版权声明
文章版权归作者所有,未经允许请勿转载。
上一篇
Preparing-for-the-Intelligence-Explosion
下一篇
Explaining Deep Neural Networks
相关文章
Causal Inference: The Mixtape
论文
8个月前
0
1,532
0
上海交通大学IPADS实验室开源MobiAgent
论文
# IPADS
# MobiAgent
# 上海交通大学
9个月前
0
458
0
Mastering the game of Go with deep neural networks and tree search
论文
7个月前
0
895
0
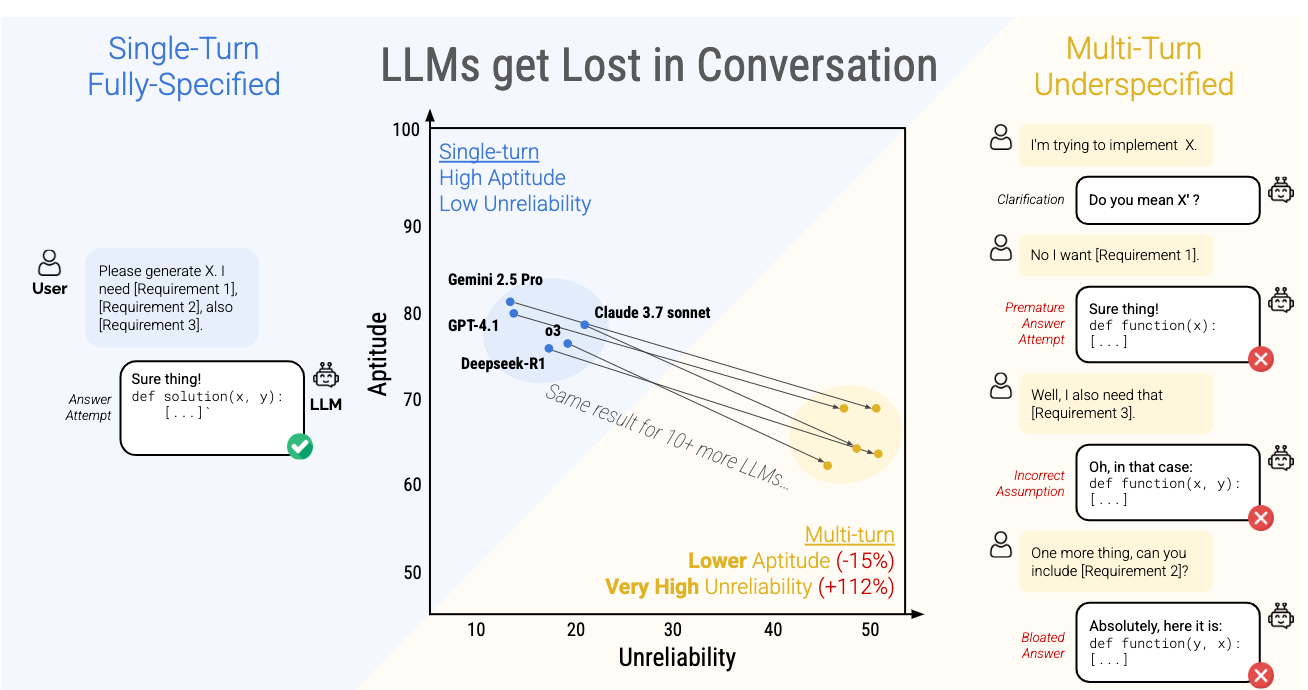
LLMs Get Lost in Multi-Turn Conversations
论文
8个月前
0
1,182
0
暂无评论
您必须登录才能参与评论!
立即登录
暂无评论...
power
管理员
161
3
10.2
M
169
B
中国人工智能产业链全景图
埃隆·马斯克:2026最新访谈 – AGI、富足与人类未来
马斯克:2026年达沃斯论坛中英对照专访实录
网址
网址
文章
软件
书籍
Hot Search
AI
Encyclopedia